
I travelled up to Osaka to see the two new aibo technology demo prototypes in action and ask questions!
The devs allowed to be more hands-on with the prototypes (I even picked one up to see how heavy it is). There are many things to mention, so I will list:
The devs allowed to be more hands-on with the prototypes (I even picked one up to see how heavy it is). There are many things to mention, so I will list:
- They are called Benny and Nolly.
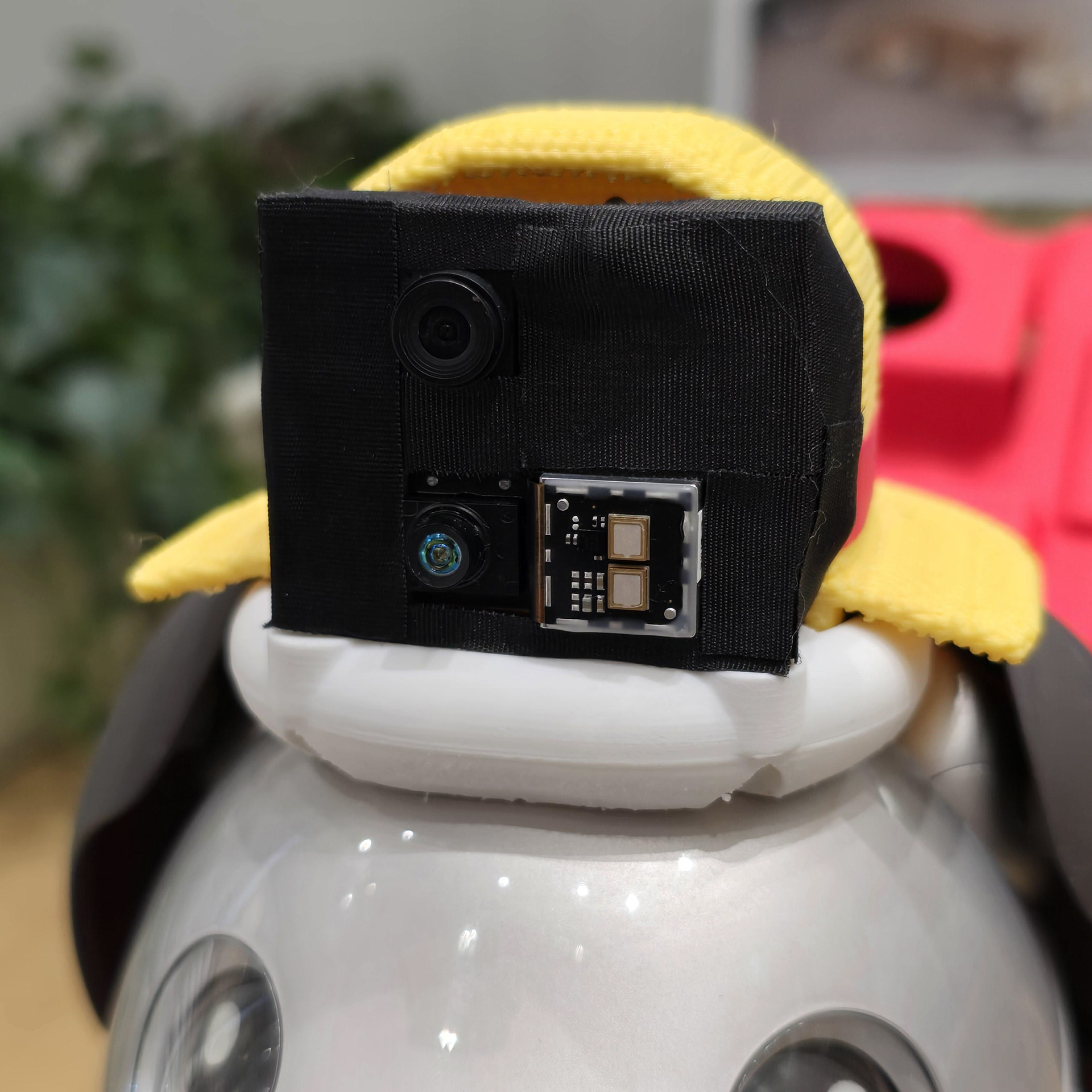
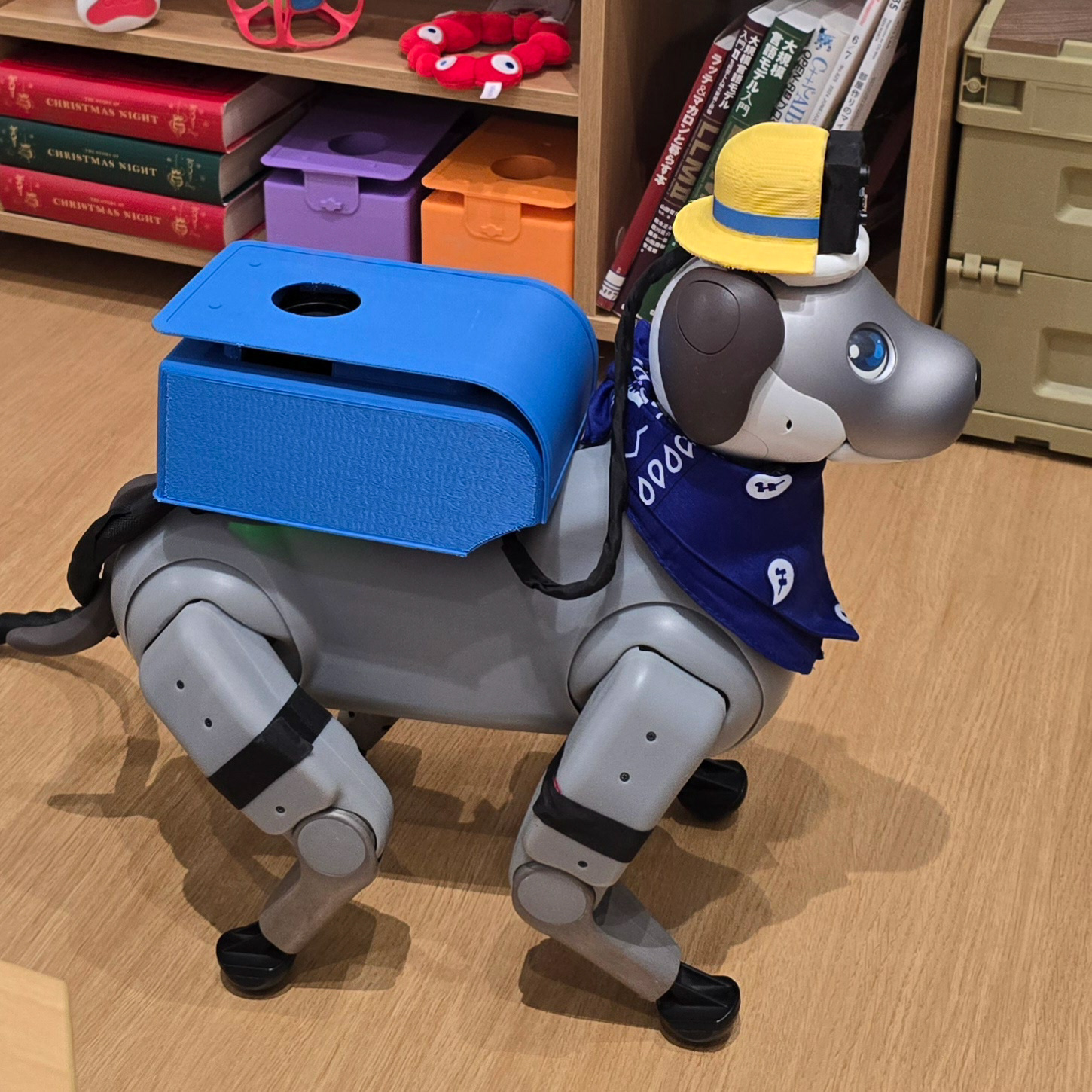
- They are both ERS-1000 units which have been built upon. The internal ERS-1000 boards are wired up to a new cable harness to the head and added NIVIDA board on the robots back (hidden under 3D printed shell). The 3D mapping camera is on the hat and has its own cable bundle leading to NIVIDA board for the processing.
- The eyes are printed paper inserts - they couldn't use the OLED array from the ERS-1000 because of incompatibility. Kept causing the robot to freeze.
- Leg internals are metal slightly altered and elongated versions of the ERS-1000's leg parts in some places.
- Different leg servos - made by same company but have more output to deal with the extra weight.
- body is a mix of OEM 1000 parts, metal CNC and 3D printed shells. Body is all Sony hardware.
- Missing sensor array on the chest and back.
- There are two body designs - one with hip rotation to study its effects on walking gate and one without. The one with the swivel is unstable walking.
- both are tech demos for the Expo. Clearly have a lot of problems (most likely from board incompatibilities). Already broken in some parts.
- Size is 1.5 times bigger than ERS-1000 and longer.
- No battery - they feed power to the robot via a cable bundle.
- Weight feels around about the same as two ERS-1000s (they are HEAVY and very uncomfortable to hold).
- They are both ERS-1000 units which have been built upon. The internal ERS-1000 boards are wired up to a new cable harness to the head and added NIVIDA board on the robots back (hidden under 3D printed shell). The 3D mapping camera is on the hat and has its own cable bundle leading to NIVIDA board for the processing.
- The eyes are printed paper inserts - they couldn't use the OLED array from the ERS-1000 because of incompatibility. Kept causing the robot to freeze.
- Leg internals are metal slightly altered and elongated versions of the ERS-1000's leg parts in some places.
- Different leg servos - made by same company but have more output to deal with the extra weight.
- body is a mix of OEM 1000 parts, metal CNC and 3D printed shells. Body is all Sony hardware.
- Missing sensor array on the chest and back.
- There are two body designs - one with hip rotation to study its effects on walking gate and one without. The one with the swivel is unstable walking.
- both are tech demos for the Expo. Clearly have a lot of problems (most likely from board incompatibilities). Already broken in some parts.
- Size is 1.5 times bigger than ERS-1000 and longer.
- No battery - they feed power to the robot via a cable bundle.
- Weight feels around about the same as two ERS-1000s (they are HEAVY and very uncomfortable to hold).
2台の新しいaibo技術デモプロトタイプの動作確認と質問のために大阪まで足を運びました!
開発者の方々はプロトタイプを実際に触らせてくださり(重さを確かめるために1台持ち上げることもできました)、特筆すべき点がたくさんあるので、以下に列挙します。
開発者の方々はプロトタイプを実際に触らせてくださり(重さを確かめるために1台持ち上げることもできました)、特筆すべき点がたくさんあるので、以下に列挙します。
- プロトタイプはBennyとNollyと呼ばれています。
- どちらもERS-1000をベースに構築されています。内部のERS-1000ボードは、頭部に取り付けられた新しいケーブルハーネスと、ロボットの背中に取り付けられたNIVIDAボード(3Dプリントされたシェルの下に隠れています)に接続されています。3Dマッピングカメラは帽子に搭載されており、専用のケーブル束がNIVIDAボードに接続され、処理が行われています。
- 目は印刷された紙製のインサートです。ERS-1000のOLEDアレイは互換性がないため使用できませんでした。ロボットがフリーズする原因となっていました。
- 脚部内部は、ERS-1000の脚部パーツを一部若干変更し、延長した金属製です。
- 脚部サーボは別物です。同じメーカー製ですが、重量増加に対応するため出力が高くなっています。
- ボディは、OEM 1000のパーツ、金属CNC、3Dプリントシェルを組み合わせたものです。ボディはすべてソニー製です。
- 胸部と背中のセンサーアレイがありません。
- ボディデザインは2種類あります。1つは歩行への影響を調べるために股関節を回転させたもの、もう1つは回転させないものです。スイベル付きのものは歩行が不安定です。
- どちらもExpo向けの技術デモです。明らかに多くの問題を抱えています(おそらく基板の非互換性が原因)。すでに一部破損しています。
- サイズはERS-1000の1.5倍以上の大きさで、さらに長くなっています。
- バッテリーは搭載されていません。ケーブル束を介してロボットに電源を供給します。
- 重さは ERS-1000 2 個分とほぼ同じです (非常に重く、持ちにくいです)。
- どちらもERS-1000をベースに構築されています。内部のERS-1000ボードは、頭部に取り付けられた新しいケーブルハーネスと、ロボットの背中に取り付けられたNIVIDAボード(3Dプリントされたシェルの下に隠れています)に接続されています。3Dマッピングカメラは帽子に搭載されており、専用のケーブル束がNIVIDAボードに接続され、処理が行われています。
- 目は印刷された紙製のインサートです。ERS-1000のOLEDアレイは互換性がないため使用できませんでした。ロボットがフリーズする原因となっていました。
- 脚部内部は、ERS-1000の脚部パーツを一部若干変更し、延長した金属製です。
- 脚部サーボは別物です。同じメーカー製ですが、重量増加に対応するため出力が高くなっています。
- ボディは、OEM 1000のパーツ、金属CNC、3Dプリントシェルを組み合わせたものです。ボディはすべてソニー製です。
- 胸部と背中のセンサーアレイがありません。
- ボディデザインは2種類あります。1つは歩行への影響を調べるために股関節を回転させたもの、もう1つは回転させないものです。スイベル付きのものは歩行が不安定です。
- どちらもExpo向けの技術デモです。明らかに多くの問題を抱えています(おそらく基板の非互換性が原因)。すでに一部破損しています。
- サイズはERS-1000の1.5倍以上の大きさで、さらに長くなっています。
- バッテリーは搭載されていません。ケーブル束を介してロボットに電源を供給します。
- 重さは ERS-1000 2 個分とほぼ同じです (非常に重く、持ちにくいです)。