
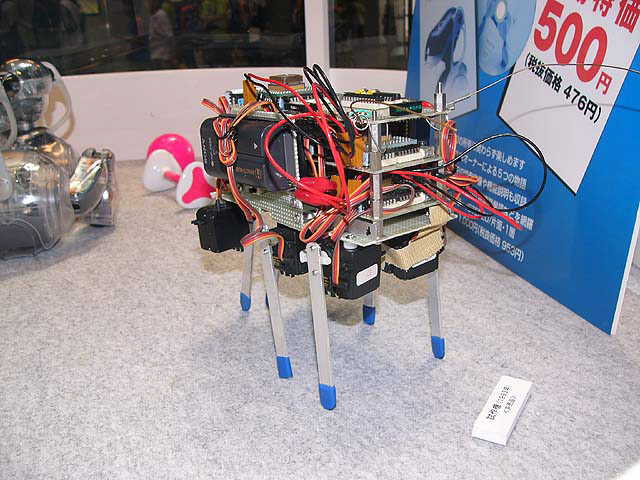
Original proof-of-concept robot hand made by Masahiro Fujita at Sony in 2 weeks. The prototype is heavily based on Gengis - a robot created at MIT that shares near enough the same configuration of legs and sensors. It appears to run off a standard Sony camcorder battery from the era and makes use of many off-the-shelf components. The prototype walks by moving its stick legs in various patterns to advance. Sensory input is limited to two metal 'whiskers' it uses to feel around the environment to avoid colliding with walls. It is able to move each matchstick leg 180 degrees back and fourth as well as outwards.
People often mistake this as being 'MUTANT' due to the thrown-together appearance and 6 matchstick legs - when in reality this prototype was never named. Confirmation of this could be seen on the old flash 'Aibo History' interactive timeline on the Sony Aibo Europe site from 2006 where it states the prototype below as being 'MUTANT' + Masahiro's own research paper on the robot project.
ソニーの藤田昌宏氏が2週間で手作りした、概念実証用のオリジナルロボット。このプロトタイプは、MITで作成されたGengis(ほぼ同じ脚とセンサーの構成を共有しているロボット)をベースにしています。当時の標準的なソニーのビデオカメラのバッテリーで動作し、多くの市販のコンポーネントを使用しているようです。プロトタイプは、棒状の脚をさまざまなパターンで動かして前進します。感覚入力は、壁との衝突を避けるために周囲の環境を感知する2本の金属の「ひげ」に限定されています。マッチ棒状の脚はそれぞれ、前後および外側に180度動かすことができます。
雑然とした外観と6本のマッチ棒状の脚のために、これを「ミュータント」と間違える人がよくいますが、実際にはこのプロトタイプに名前はありませんでした。この確認は、2006 年の Sony Aibo Europe サイトの古い Flash「Aibo History」インタラクティブ タイムラインで確認でき、そこには以下のプロトタイプが「MUTANT」であり、ロボット プロジェクトに関する Masahiro 氏自身の研究論文であると記載されています。
雑然とした外観と6本のマッチ棒状の脚のために、これを「ミュータント」と間違える人がよくいますが、実際にはこのプロトタイプに名前はありませんでした。この確認は、2006 年の Sony Aibo Europe サイトの古い Flash「Aibo History」インタラクティブ タイムラインで確認でき、そこには以下のプロトタイプが「MUTANT」であり、ロボット プロジェクトに関する Masahiro 氏自身の研究論文であると記載されています。
The first prototype is a commercially available microchip, a radio-controlled motor, and a six-legged insect-type robot with a battery taped to an aluminium plate. It was the size of a paperback book, and it used its beard to detect obstacles.
最初のプロトタイプは、市販のマイクロチップ、無線制御モーター、そしてアルミ板にテープで固定されたバッテリーを備えた6本足の昆虫型ロボットです。文庫本ほどの大きさで、ひげを使って障害物を検知します。