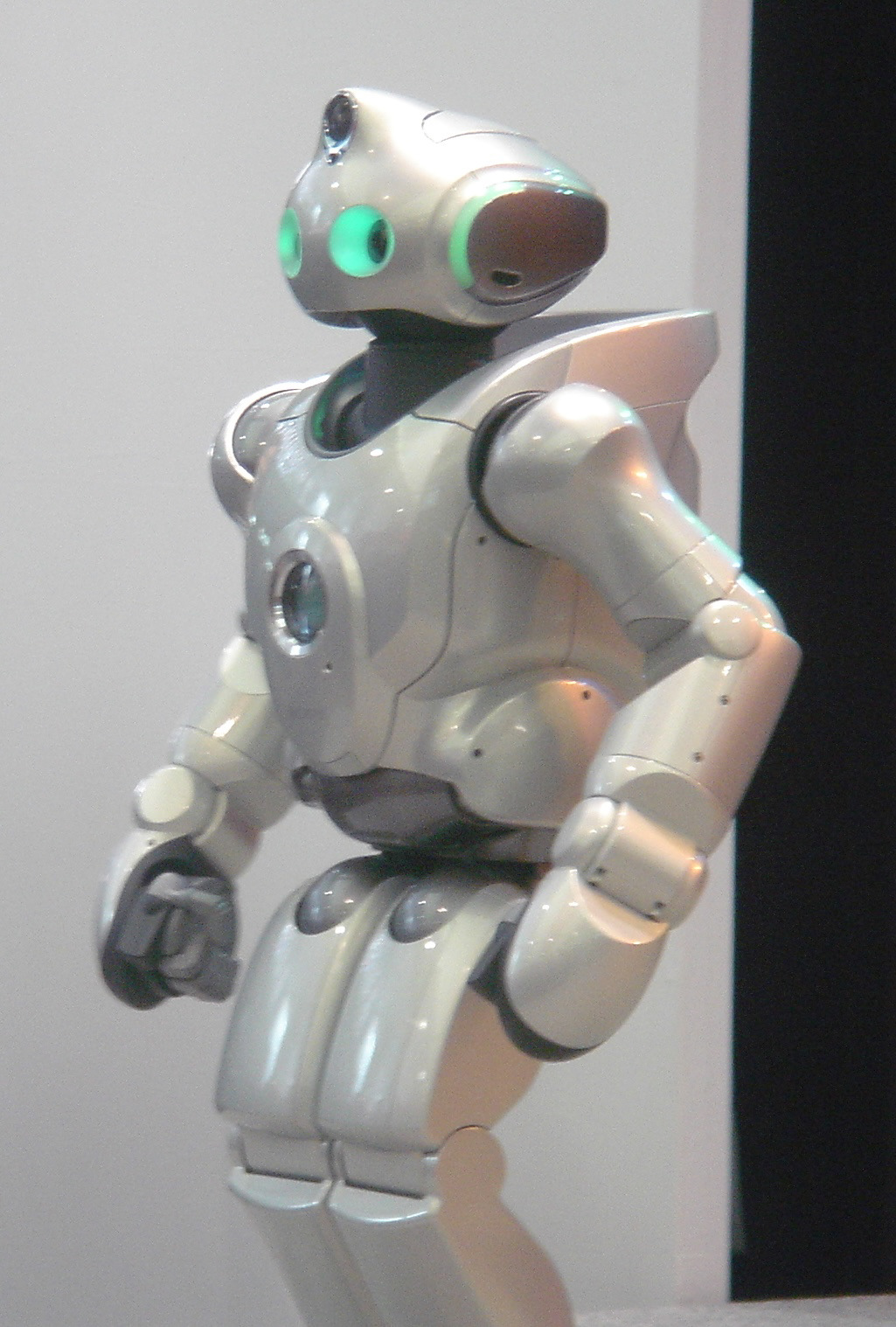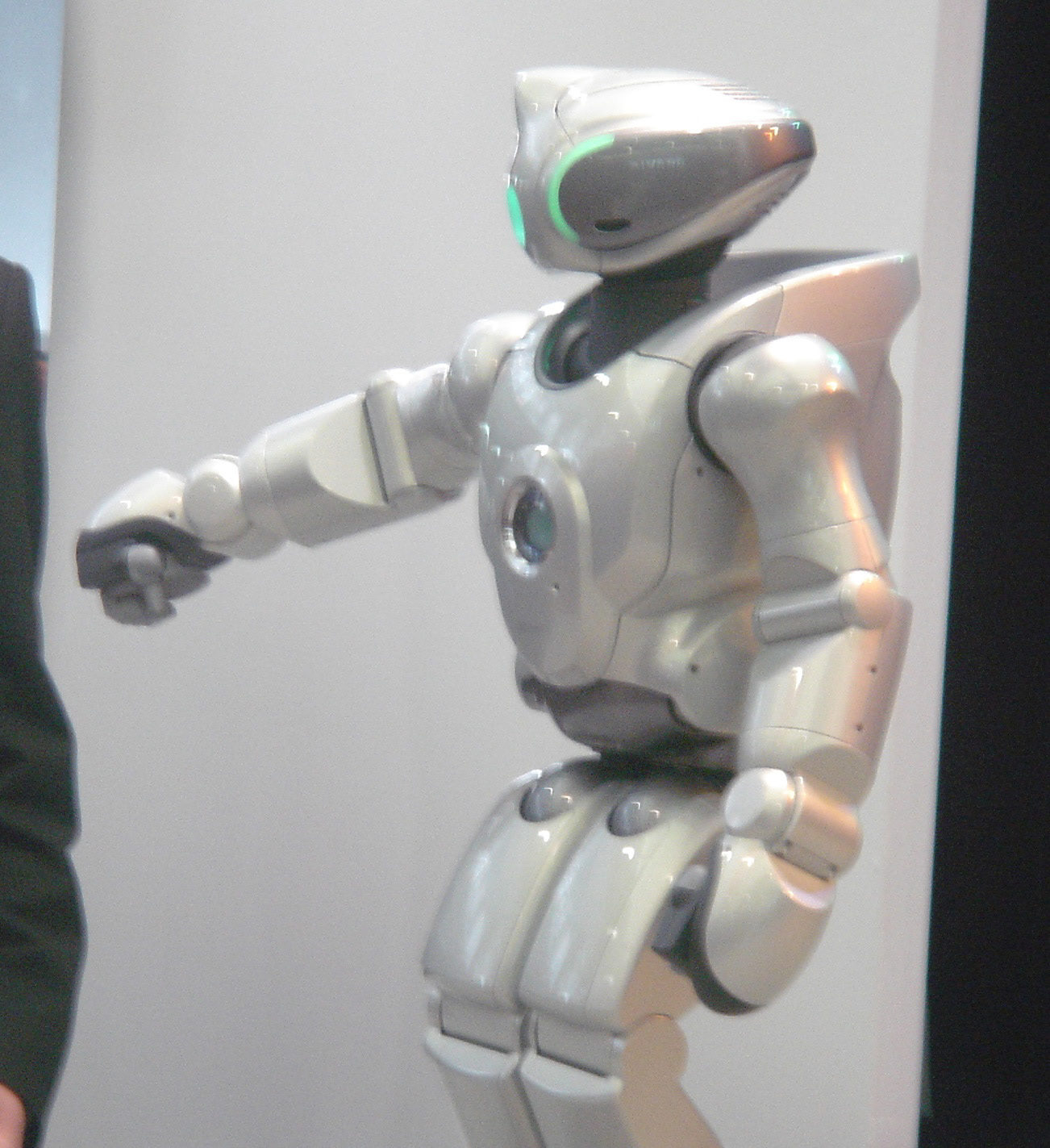
SDR-4X - The Beginning of QRIO



Prototype "SDR-4X" Main Specifications
CPU: 64 bit RISC processor (x2)
Main Recording Device: 64MB DRAM (x2)
Operating System: Aperios (Sony's original real time OS)
Robot Control Architecture: OPEN-R
Control Program Supplying media: 16MB Memory Stick
Joint Degrees of Freedom: Neck: 4 degrees of freedom, Body: 2 degrees of freedom, Arms: 5 degrees of freedom (x2), Legs: 6 degrees of freedom (x2); total 28 degrees of freedom + 5 fingers on each hand
Internal Sensors Distance Detection Infrared Distance Sensor: head x1, hands x2, total 3
Acceleration Detection Trunk: X, Y, Z/3 axes, Legs: X, Y/2 axes
Angular Rate Detection Trunk: X, Y, Z/3 axes
Foot Sole Sensor Power Sensor (each leg: 4 x 2 = total 8)
Thermo Sensor External (x4), Internal (x2)
Touch Sensor Head Pressure Sensitive Rubber
Handle Sheet Switch
Hands Sheet Switch X2
Shoulders Tact Switch X2
Image Input 110,000 pixels 1/5 inch CCD color camera (x2)
Sound Input Microphone (x7)
Sound Output Speaker
Input/Output PC Card Slot (Type II) (x1)
Memory Stick Slot (x1)
Display Eye LED 4096 color (RGB 16 gradation combination)
Ear LED 1 color 16 gradation
Power LED 2 colors (3 colors in simultaneous lighting) Performance/Charging Condition Display
Walking Speed Approximately 6m/minute max (irregular surface)Pace: 10cm, Walking Cycle: 1.0 second/step
Approximately 20m/minute max (flat, smooth surface)Pace: 6.5cm, Walking Cycle: 0.20 second/step
Irregular Surface Walking Ability Irregularity degree: 10mm irregular surface on non-slip condition
Tilt degree: Up to approx. 10 degrees tilted surface on non-slip condition
Weight Approximately 6.5Kg with battery and memory
Dimensions (height x width x depth) Approximately 580 x 260 x 190mm
Prototype "SDR-4X" Key Characteristics
1) Real-time Integrated Adaptive Motion Control
Integrated Adaptive Control can be realized in real time for walking on irregular and/or tilted surfaces and retaining posture under external pressure (i.e. when pushed).
- Ability to walk on an irregular surface up to 10mm approximately in variation
- Ability to walk up and down on a tilted surface up to 10 degrees approximately
- To prevent falling over under external pressure, the SDR-4X automatically performs footfall and step back to maintain its standing posture.
- If it falls over, damage will be limited by the robot's flexible joint control and effective damage avoidance posture retention.
2) Real-time Gait Pattern Generation Control
This technology produces the necessary walking patterns by altering walking pace, cycle and rotating angle in accordance with the situation and environment, based on information from the robot's sensors. This achieves a stable and smooth gait for autonomous walking.
This technology produces the necessary walking patterns by altering walking pace, cycle and rotating angle in accordance with the situation and environment, based on information from the robot's sensors. This achieves a stable and smooth gait for autonomous walking.
3) Real-world Space Perception Technology
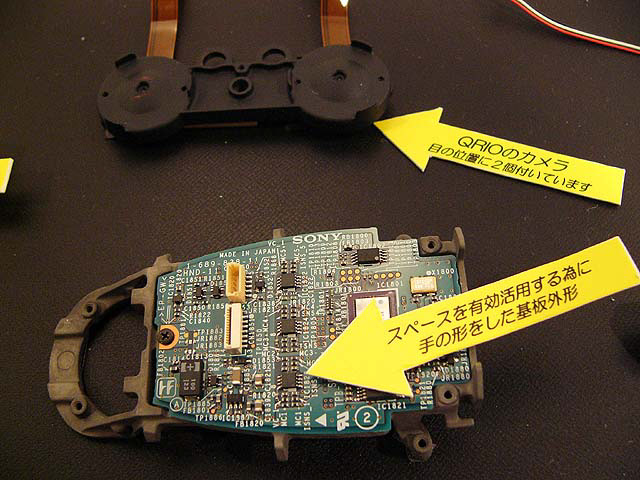
With 2 CCD cameras embedded in its head, the SDR-4X can detect the distance between itself and an object and perceive the range in-between and the figuration of an object. Based on this information, SDR-4X can automatically calculate a route to make its way around the object. 7 microphones equipped in the head make it possible for the SDR-4X to detect the direction of a sound source.
With 2 CCD cameras embedded in its head, the SDR-4X can detect the distance between itself and an object and perceive the range in-between and the figuration of an object. Based on this information, SDR-4X can automatically calculate a route to make its way around the object. 7 microphones equipped in the head make it possible for the SDR-4X to detect the direction of a sound source.
4) Multi-modal Human Interaction Technology
1. Individual person detection, recognition learning technology
- Ability to detect and recognize a face (front face) against a complex background
- Ability to memorize up to 10 individual faces through the learning functions
- Ability to recognize individuals by the tone of their voice.
1. Individual person detection, recognition learning technology
- Ability to detect and recognize a face (front face) against a complex background
- Ability to memorize up to 10 individual faces through the learning functions
- Ability to recognize individuals by the tone of their voice.
2. Continuous speech recognition and unknown vocabulary acquisition
- Ability to recognize continuous speech for many vocabularies by synchronizing data processing with an externally connected PC via wireless LAN
- Ability to learn and memorize new words not listed on its dictionary.
- Ability to recognize continuous speech for many vocabularies by synchronizing data processing with an externally connected PC via wireless LAN
- Ability to learn and memorize new words not listed on its dictionary.
3. Conversation, performance control technology based on its short-term and long-term memory
In addition to short-term memory functions to temporary memorize individuals and objects, SDR-4X is equipped with long-term memory functions to memorize faces and names through more in-depth communications with people. Emotional information based on a communication experience will be memorized on a long-term memory as well. By utilizing both short and long-term memories, the SDR-4X achieves more complicated conversations and performances.
In addition to short-term memory functions to temporary memorize individuals and objects, SDR-4X is equipped with long-term memory functions to memorize faces and names through more in-depth communications with people. Emotional information based on a communication experience will be memorized on a long-term memory as well. By utilizing both short and long-term memories, the SDR-4X achieves more complicated conversations and performances.
4. Speech synthesis and singing voice production
- High level of entertainment by emotionally expressive speech and voice production synchronized with full body performance
- Capability to produce singing voice with vibratos through voice synthesis by inputting music and lyric data.
- High level of entertainment by emotionally expressive speech and voice production synchronized with full body performance
- Capability to produce singing voice with vibratos through voice synthesis by inputting music and lyric data.
5) Safe design for interaction with people
Safe design including a joint structure that does not trap hands and fingers in between joints has been adopted for safe interaction with people
Safe design including a joint structure that does not trap hands and fingers in between joints has been adopted for safe interaction with people
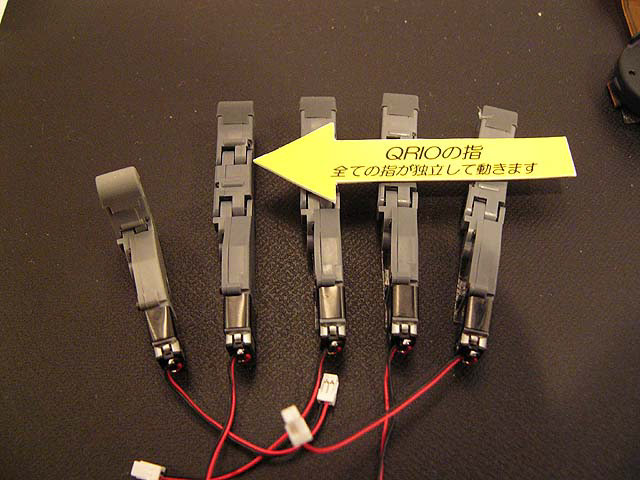
6) Improved expression by adding more degrees of freedom
4 axes in the robot's head and 1 axis in the wrist have been added in order to improve the robot's expression. 5 individually movable fingers are also attached to each hand.
4 axes in the robot's head and 1 axis in the wrist have been added in order to improve the robot's expression. 5 individually movable fingers are also attached to each hand.
7) Improved performance of small actuators
Compared to the small actuators used in prototype "SDR-3X" announced in November 2000, a more advanced physical performance and response can be achieved by an approximately 30% improvement in the start-up torque, an approximately 15% improvement in rated torque, and an approximately 20% improvement in efficiency.
Compared to the small actuators used in prototype "SDR-3X" announced in November 2000, a more advanced physical performance and response can be achieved by an approximately 30% improvement in the start-up torque, an approximately 15% improvement in rated torque, and an approximately 20% improvement in efficiency.
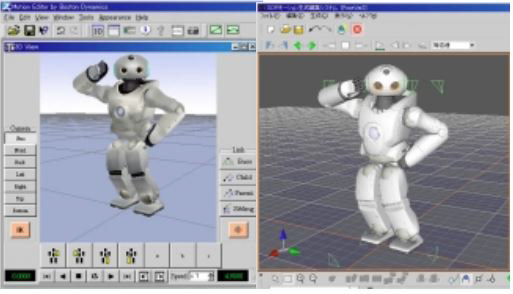
8) SDR Motion Creator
SDR Motion Creator is a software system that enables the easy production and editing of a variety of movements such as dancing, using a PC. This software also includes automatic correction functions to prevent the robot's falling over while performing complex movements input by a creator or user. This enables the robot to easily produce complicated, personalized performances.
SDR Motion Creator is a software system that enables the easy production and editing of a variety of movements such as dancing, using a PC. This software also includes automatic correction functions to prevent the robot's falling over while performing complex movements input by a creator or user. This enables the robot to easily produce complicated, personalized performances.
プロトタイプ「SDR-4X」の主な特徴
1) リアルタイム統合適応動作制御
不整地や傾斜面における歩行、および外圧(例えば押圧)下での姿勢保持をリアルタイムに統合適応制御で実現します。
- 約10mmの凹凸面を歩行可能
- 約10度の傾斜面を上下歩行可能
- 外圧による転倒を防ぐため、SDR-4Xは自動的に足踏み動作とステップバック動作を行い、立位姿勢を維持します。
- 万が一転倒した場合でも、柔軟な関節制御と効果的な姿勢保持により、損傷を最小限に抑えます。
不整地や傾斜面における歩行、および外圧(例えば押圧)下での姿勢保持をリアルタイムに統合適応制御で実現します。
- 約10mmの凹凸面を歩行可能
- 約10度の傾斜面を上下歩行可能
- 外圧による転倒を防ぐため、SDR-4Xは自動的に足踏み動作とステップバック動作を行い、立位姿勢を維持します。
- 万が一転倒した場合でも、柔軟な関節制御と効果的な姿勢保持により、損傷を最小限に抑えます。
2) リアルタイム歩行パターン生成制御
この技術は、ロボットに搭載されたセンサー情報に基づき、状況や環境に応じて歩行速度、周期、回転角度を変化させることで、必要な歩行パターンを生成します。これにより、自律歩行において安定した滑らかな歩行を実現します。
3) 実世界空間認識技術
SDR-4Xは、頭部に搭載された2台のCCDカメラにより、物体との距離、物体間の距離、物体の形状を検知します。これらの情報に基づき、物体を迂回するルートを自動で計算します。また、頭部に搭載された7個のマイクにより、音源の方向も検知可能です。
4) マルチモーダルヒューマンインタラクション技術
1. 人物検出・認識学習技術
- 複雑な背景から顔(正面顔)を検出・認識
- 学習機能により最大10人の顔を記憶
- 声のトーンから人物を認識
2. 連続音声認識・未知語彙獲得
- 無線LAN経由で外部接続されたPCと同期処理することで、多数の語彙の連続音声を認識
- 辞書に登録されていない新しい単語を学習・記憶
3. 短期記憶と長期記憶を活用した会話・演奏制御技術
SDR-4Xは、人物や物を一時的に記憶する短期記憶機能に加え、人とのより深いコミュニケーションを通して顔や名前を記憶する長期記憶機能を搭載しています。コミュニケーション体験に基づく感情情報も長期記憶に記憶されます。短期記憶と長期記憶の両方を活用することで、SDR-4Xはより複雑な会話や演奏を実現します。
4. 音声合成・歌声生成
- 全身を使ったパフォーマンスと同期した、感情豊かな発声・歌声生成による、高いエンタテインメント性
- 楽曲と歌詞データを入力することで、音声合成によるビブラートを効かせた歌声生成が可能。
5) 人とのインタラクションを考慮した安全設計
人とのインタラクションを安全に行うため、関節に手や指が挟まれない構造など、安全設計を採用しています。
6) 自由度追加による表現力の向上
ロボットの表現力を向上させるため、頭部に4軸、手首に1軸を追加しました。また、各ハンドには5本の指を独立して可動させています。
7) 小型アクチュエータの性能向上
2000年11月に発表した試作機「SDR-3X」に搭載した小型アクチュエータと比較して、起動トルクを約30%、定格トルクを約15%、効率を約20%向上させ、より高度な運動性能と応答性を実現しました。
8) SDR Motion Creator
SDR Motion Creatorは、ダンスなどの様々な動作をPC上で簡単に作成・編集できるソフトウェアシステムです。作成者やユーザーが入力した複雑な動作において、ロボットの転倒を防ぐ自動補正機能も搭載しています。これにより、ロボットは複雑でパーソナライズされたパフォーマンスを簡単に生成できるようになります。
SDR-4XII - QRIO Gets Smarter

<SDR-4X II> is the enhanced version of <SDR-4X> which was developed last year. The enhancements focus on its motion control and communication capabilities with people.
(1)Enhancement in motion control capabilities
One of the most important issues which must be addressed in biped walking robots is the solution for fall-over. In <SDR-4X II>, in addition to its ability to not fall-over, technologies have been applied to deal with the situation when it actually does fall-over. In case it is faced with a fall-over situation, it will adjust to make a motion control to avoid this in advance. Also, if it cannot avoid fall-over, it will simultaneously take a posture to minimize the damage. It comes equipped with a Fall-over Avoidance Motion Control System. Here, actuators make compliant control to reduce the impact of the ground contact with the cooperative motion control of the fall-over in any direction. In the new model, Recovery Motion Control System has been enhanced for recovery from the fall-over situation.
One of the most important issues which must be addressed in biped walking robots is the solution for fall-over. In <SDR-4X II>, in addition to its ability to not fall-over, technologies have been applied to deal with the situation when it actually does fall-over. In case it is faced with a fall-over situation, it will adjust to make a motion control to avoid this in advance. Also, if it cannot avoid fall-over, it will simultaneously take a posture to minimize the damage. It comes equipped with a Fall-over Avoidance Motion Control System. Here, actuators make compliant control to reduce the impact of the ground contact with the cooperative motion control of the fall-over in any direction. In the new model, Recovery Motion Control System has been enhanced for recovery from the fall-over situation.
(2)Improvement in Safety Capabilities
The key to success for entertainment robots lies in interaction with people. Safe design with respect to interaction with people is therefore vital. In <SDR-4X II>, a newly developed small-size actuator is introduced to enable high performance such as Active Compliance Control and Active Shock Absorbance Control. If something gets trapped in the moving parts of the robot, it is so designed that many of the touch sensors in the moving parts will detect the situation, leveling down the power of actuators to a safe level. Also, by grabbing on the grip at the back of the robot and lifting it up, the overall movement level can be reduced, as well as powering down the torque at each joint by lifting it up for safe maintenance.
The key to success for entertainment robots lies in interaction with people. Safe design with respect to interaction with people is therefore vital. In <SDR-4X II>, a newly developed small-size actuator is introduced to enable high performance such as Active Compliance Control and Active Shock Absorbance Control. If something gets trapped in the moving parts of the robot, it is so designed that many of the touch sensors in the moving parts will detect the situation, leveling down the power of actuators to a safe level. Also, by grabbing on the grip at the back of the robot and lifting it up, the overall movement level can be reduced, as well as powering down the torque at each joint by lifting it up for safe maintenance.
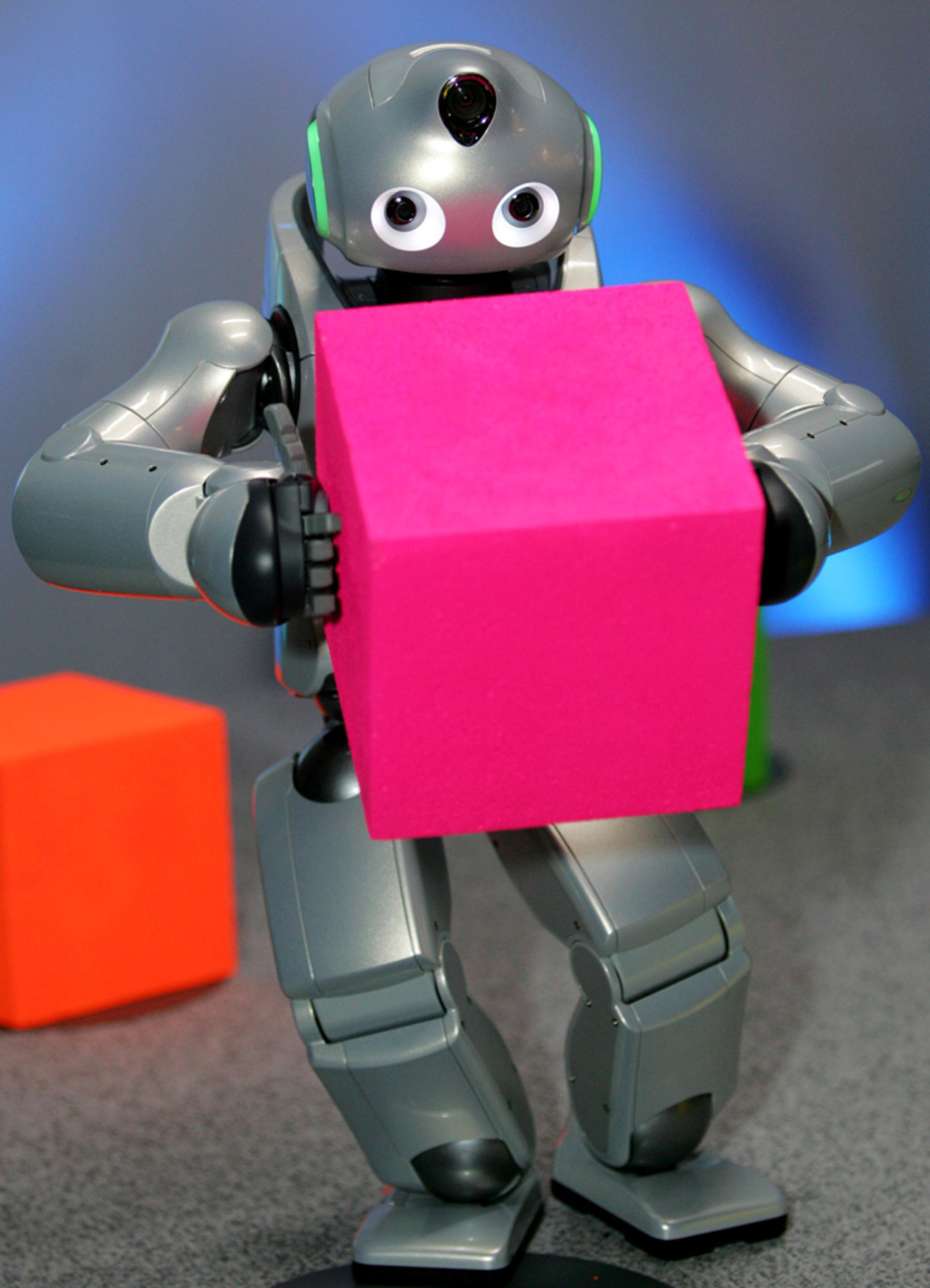
(3)Introduction of Map-building/Identification capabilities
Recognizing pre-registered color identifiers, <SDR-4X II>will learn the configuration of the color identifiers.
An enhancement is the newly introduced 'map-building/identification capability', allowing the robot to self-recognize its estimated location in this learned configuration. From this capability, using color recognition, the robot is able to use its judgment to move to an adequate position or to make a move appropriate to its positioning/location.
Recognizing pre-registered color identifiers, <SDR-4X II>will learn the configuration of the color identifiers.
An enhancement is the newly introduced 'map-building/identification capability', allowing the robot to self-recognize its estimated location in this learned configuration. From this capability, using color recognition, the robot is able to use its judgment to move to an adequate position or to make a move appropriate to its positioning/location.
(4)Enhancement in spoken dialogue capabilities
By adding one CPU for speech recognition and synthesis, it is possible to internally process recognition of large vocabularies (approximately 20,000 vocabularies), which was only previously possible by connecting to an external PC, enabling improved response. In addition, ability to memorize individual faces and names is improved, by memorizing various words from spoken dialogue with people, realizing spoken dialogue that matches each individual. Furthermore, preset topic-wise scenario offers interesting spoken dialogue, geared to each individual. The robot is capable of responding differently utilizing the new phrase-driven dialogue skill, enabling entertainment-rich conversation.
By adding one CPU for speech recognition and synthesis, it is possible to internally process recognition of large vocabularies (approximately 20,000 vocabularies), which was only previously possible by connecting to an external PC, enabling improved response. In addition, ability to memorize individual faces and names is improved, by memorizing various words from spoken dialogue with people, realizing spoken dialogue that matches each individual. Furthermore, preset topic-wise scenario offers interesting spoken dialogue, geared to each individual. The robot is capable of responding differently utilizing the new phrase-driven dialogue skill, enabling entertainment-rich conversation.
(5)Development of Entertainment content
Including an original song called 'Kiseki no Tabi', composed by Ryuichi Sakamoto, and lyrics by Takashi Nakahata, more than 10 songs, 1,000 motions of various scales and 200 scenarios of interactive spoken dialogue have been developed as entertainment content for <SDR-4X II>. Also, a design tool is developed, by which it is possible to design autonomous behavior by combining these contents. Thus, it is possible to develop an entertainment robot that provides entertainment with natural autonomous behavior.
Including an original song called 'Kiseki no Tabi', composed by Ryuichi Sakamoto, and lyrics by Takashi Nakahata, more than 10 songs, 1,000 motions of various scales and 200 scenarios of interactive spoken dialogue have been developed as entertainment content for <SDR-4X II>. Also, a design tool is developed, by which it is possible to design autonomous behavior by combining these contents. Thus, it is possible to develop an entertainment robot that provides entertainment with natural autonomous behavior.
(6)Power-charging station
An internal battery charging system as well as a separate station to obtain and install the robot's internal information are newly developed.
An internal battery charging system as well as a separate station to obtain and install the robot's internal information are newly developed.
<SDR-4X II>は、昨年開発された<SDR-4X>の改良版です。今回の改良は、動作制御と人とのコミュニケーション機能に重点を置いています。
(1)動作制御機能の強化
二足歩行ロボットにおいて、最も重要な課題の一つは転倒への対応です。<SDR-4X II>では、転倒しないという従来の機能に加え、実際に転倒してしまった場合の対応技術を採用しました。転倒の危険に直面すると、事前に転倒を回避する動作制御を行います。また、転倒が避けられない場合は、同時に転倒によるダメージを最小限に抑える姿勢をとります。転倒回避動作制御システムを搭載しており、アクチュエータが追従制御を行い、あらゆる方向への転倒動作制御と協調動作を行うことで、接地時の衝撃を軽減します。さらに、新モデルでは、転倒からの回復を支援するリカバリ動作制御システムも強化されています。
二足歩行ロボットにおいて、最も重要な課題の一つは転倒への対応です。<SDR-4X II>では、転倒しないという従来の機能に加え、実際に転倒してしまった場合の対応技術を採用しました。転倒の危険に直面すると、事前に転倒を回避する動作制御を行います。また、転倒が避けられない場合は、同時に転倒によるダメージを最小限に抑える姿勢をとります。転倒回避動作制御システムを搭載しており、アクチュエータが追従制御を行い、あらゆる方向への転倒動作制御と協調動作を行うことで、接地時の衝撃を軽減します。さらに、新モデルでは、転倒からの回復を支援するリカバリ動作制御システムも強化されています。
(2)安全機能の向上
エンターテインメントロボットの成功の鍵は、人とのインタラクションにあります。そのため、人とのインタラクションにおける安全設計は不可欠です。<SDR-4X II>では、新開発の小型アクチュエータを採用し、アクティブコンプライアンス制御やアクティブ衝撃吸収制御といった高性能を実現しています。ロボットの可動部に何かが挟まった場合、可動部に搭載された多数のタッチセンサーがそれを検知し、アクチュエータの出力を安全なレベルまで下げる設計となっています。また、ロボット背面のグリップを掴んで持ち上げることで、全体の動作レベルを下げるだけでなく、各関節のトルクを下げて安全にメンテナンスを行うこともできます。
エンターテインメントロボットの成功の鍵は、人とのインタラクションにあります。そのため、人とのインタラクションにおける安全設計は不可欠です。<SDR-4X II>では、新開発の小型アクチュエータを採用し、アクティブコンプライアンス制御やアクティブ衝撃吸収制御といった高性能を実現しています。ロボットの可動部に何かが挟まった場合、可動部に搭載された多数のタッチセンサーがそれを検知し、アクチュエータの出力を安全なレベルまで下げる設計となっています。また、ロボット背面のグリップを掴んで持ち上げることで、全体の動作レベルを下げるだけでなく、各関節のトルクを下げて安全にメンテナンスを行うこともできます。
(3)マップ構築/識別機能の導入
<SDR-4X II>は、事前に登録された色識別情報を認識し、その構成を学習します。
新たに導入された「マップ構築・識別機能」は、学習した配置における推定位置をロボットが自己認識できる機能です。この機能により、色認識を用いて適切な位置への移動や、位置・場所に応じた動作をロボット自身が判断することが可能になります。
<SDR-4X II>は、事前に登録された色識別情報を認識し、その構成を学習します。
新たに導入された「マップ構築・識別機能」は、学習した配置における推定位置をロボットが自己認識できる機能です。この機能により、色認識を用いて適切な位置への移動や、位置・場所に応じた動作をロボット自身が判断することが可能になります。
(4)音声対話機能の強化
音声認識・合成用CPUを1基追加することで、従来は外部PCに接続することでしか実現できなかった大規模語彙(約2万語)の認識を内部処理できるようになり、応答性が向上しました。また、人物との会話から様々な単語を記憶することで、個人の顔や名前の記憶能力が向上し、一人ひとりに合わせた対話を実現します。さらに、あらかじめ設定されたトピック別シナリオにより、各個人に合わせた魅力的な対話を実現します。さらに、新たに搭載されたフレーズ駆動型対話スキルを活用することで、ロボットは異なる応答をすることで、エンターテイメント性豊かな会話を実現します。
音声認識・合成用CPUを1基追加することで、従来は外部PCに接続することでしか実現できなかった大規模語彙(約2万語)の認識を内部処理できるようになり、応答性が向上しました。また、人物との会話から様々な単語を記憶することで、個人の顔や名前の記憶能力が向上し、一人ひとりに合わせた対話を実現します。さらに、あらかじめ設定されたトピック別シナリオにより、各個人に合わせた魅力的な対話を実現します。さらに、新たに搭載されたフレーズ駆動型対話スキルを活用することで、ロボットは異なる応答をすることで、エンターテイメント性豊かな会話を実現します。
(5)エンターテインメントコンテンツの開発
坂本龍一作曲、中畑貴志作詞によるオリジナルソング「奇跡の旅」をはじめ、10曲以上の楽曲、様々なスケールの1,000種類のモーション、200種類のインタラクティブな音声対話シナリオを<SDR-4X II>用のエンターテインメントコンテンツとして開発しました。また、これらのコンテンツを組み合わせることで自律行動を設計できる設計ツールも開発しました。これにより、自然な自律行動によるエンターテインメントを提供するエンターテインメントロボットの開発が可能になります。
坂本龍一作曲、中畑貴志作詞によるオリジナルソング「奇跡の旅」をはじめ、10曲以上の楽曲、様々なスケールの1,000種類のモーション、200種類のインタラクティブな音声対話シナリオを<SDR-4X II>用のエンターテインメントコンテンツとして開発しました。また、これらのコンテンツを組み合わせることで自律行動を設計できる設計ツールも開発しました。これにより、自然な自律行動によるエンターテインメントを提供するエンターテインメントロボットの開発が可能になります。
(6)充電ステーション
内蔵バッテリー充電システムに加え、ロボット内部の情報を取得・インストールするための充電ステーションを新たに開発しました。
内蔵バッテリー充電システムに加え、ロボット内部の情報を取得・インストールするための充電ステーションを新たに開発しました。

Visualisation of QRIO's mapping capabilities.

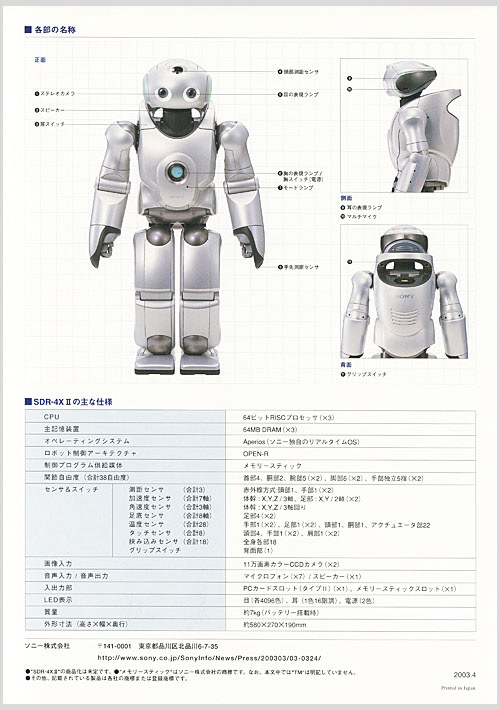
Parts Gallery
Battery and Access Bay
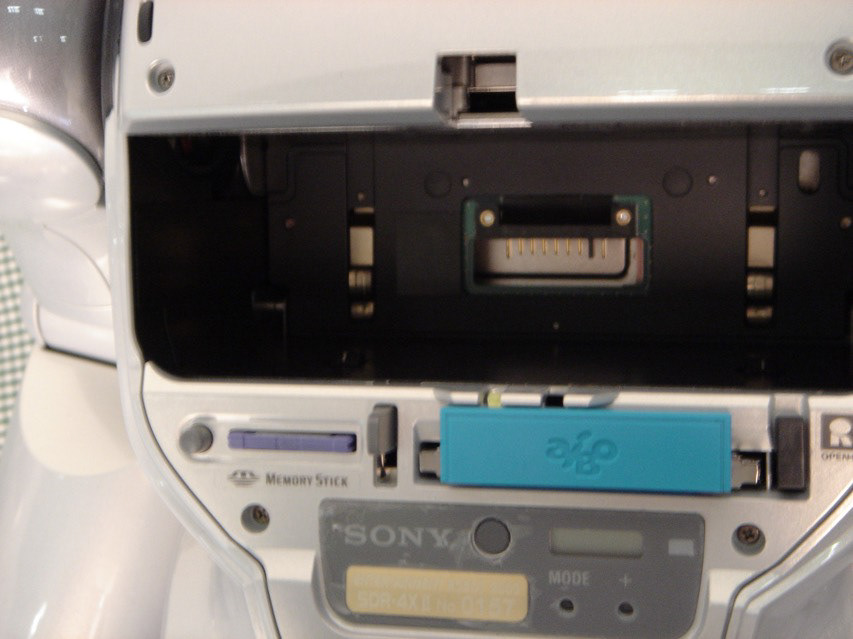
Located under QRIO's chest plate - The black area is the large battery inserted into the cavity. Below that is the MemoryStick for the software, the blue object next to it is a 2xx series aibo LAN card and below that is the time/date input area (similar to what is found on a 2xx series aibo core block). The gold sticker states model number and serial number.
QRIOの胸部プレートの下にある黒い部分は、空洞に挿入された大きな電池です。その下にはソフトウェア用のメモリースティック、その隣にある青い部分は2xxシリーズaibo用LANカード、その下には日付と時刻を入力する部分(2xxシリーズaiboのコアブロックに似たもの)があります。金色のステッカーにはモデル番号とシリアル番号が記載されています。
Prototype "SDR-4X II" Main Specifications
CPU64 bit RISC processor (3)
Main Memory64MB DRAM (3)
Operating System : Aperios (Sony's original real time OS)
Robot Control ArchitectureOPEN-R
Control Program Supplying MediaMemory Stick
Joint Degree of Freedom (Total:38 DOF)Neck:4 DOF, Body:2 DOF, Arms:5 DOF (x2), Legs:6 DOF (x2), independent hands (5 fingers on each hand)
Sensors & Switch Distance SensorInfrared system distance sensor:Head 1,Hand 1 (x2)
Acceleration SensorTrunk:X,Y,Z/3 axes, Foot:X,Y/2 axes (x2)
Angular Rate SensorTrunk:X,Y,Z/3 axes
Foot SensorFoot 4 (x2)
Thermo SensorHand 1 (x2),Foot 1 (x2),Head 1,Body1,Actuator 22
Touch SensorHead:4,Hand:1 (x2),Shoulder:1 (x2)
Pinch Detection SensorOverall:18
Grip switchBack:1
Image Input110,000 color pixels CCD camera (x2)
Audio IN/OUTMicrophone (x7) / Speaker (x1)
Input/OutputPC card slot (TypeII) (x1),
Memory Stick slot (x1)
Memory Stick slot (x1)
LED displayEye (4096 colors each), Ears (1 color, 16 gradation), Power (2 colors)
WeightApproximately 7kg (with battery and memory)
Dimension (height x width x depth)Approximately 580 x 270 x 190mm
試作機「SDR-4X II」主な仕様
CPU:64ビットRISCプロセッサ (3基)
メインメモリ:64MB DRAM (3基)
オペレーティングシステム:Aperios (ソニー独自リアルタイムOS)
ロボット制御アーキテクチャ:OPEN-R
制御プログラム供給メディア:メモリースティック
関節自由度(合計:38自由度):首:4自由度、胴体:2自由度、腕:5自由度 (x2)、脚:6自由度 (x2)、独立ハンド(各手5本指)
センサー&スイッチ:距離センサー:赤外線式距離センサー:頭部1個、手部1個 (x2)
加速度センサー:体幹:X、Y、Z軸/3軸、足部:X、Y軸/2軸 (x2)
角速度センサー:体幹:X、Y、Z軸/3軸
足部センサー:足部4個 (x2)
温度センサー:手部1個 (x2)、足部1(×2)、ヘッド1、ボディ1、アクチュエータ22
タッチセンサー:ヘッド:4、ハンド:1(×2)、ショルダー:1(×2)
挟み込み検知センサー:全体:18
グリップスイッチ:背面:1
画像入力:11万画素カラーCCDカメラ(×2)
音声入出力:マイク(×7)/スピーカー(×1)
入出力:PCカードスロット(TypeII)(×1)、
メモリースティックスロット(×1)
LEDディスプレイ:目(各4096色)、耳(1色、16階調)、電源(2色)
重量:約7kg(バッテリー、メモリを含む)
寸法(高さ×幅×奥行き):約580×270×190mm


Named 4 Gallery




Brochures


Packaging for QRIO SDR-4X II


Promotional Goods

SDR-4XIIe - The Final Revision