Before-Aibo Prototypes (1993-1998)
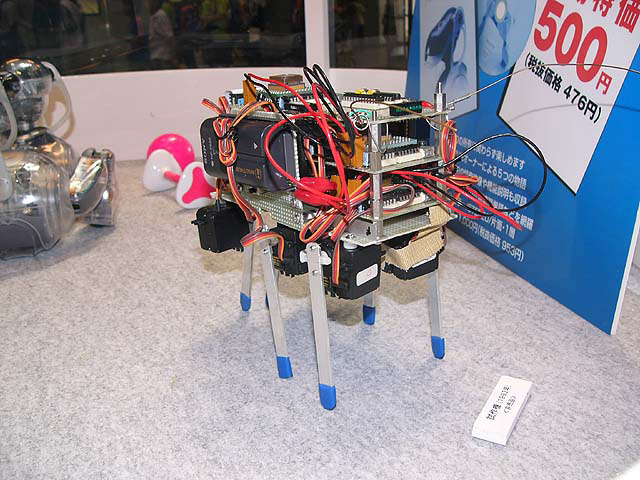
Original Prototype
Original proof-of-concept robot hand made by Masahiro Fujita at Sony in 2 weeks. The prototype is heavily based on Gengis - a robot created at MIT that shares near enough the same configuration of legs and sensors. It appears to run off a standard Sony camcorder battery from the era and makes use of many off-the-shelf components. The prototype walks by moving its stick legs in various patterns to advance. Sensory input is limited to two metal 'whiskers' it uses to feel around the enviroment to avoid colliding with walls. It is able to move each matchstick leg 180 degrees back and fourth as well as outwards.
People often mistake this as being 'MUTANT' due to the thrown-together appearance and 6 matchstick legs - when in reality this prototype was never named. Confirmation of this could be seen on the old flash 'Aibo History' interactive timeline on the Sony Aibo Europe site from 2006 where it states the prototype below as being 'MUTANT' + Masahiro's own research paper on the robot project.

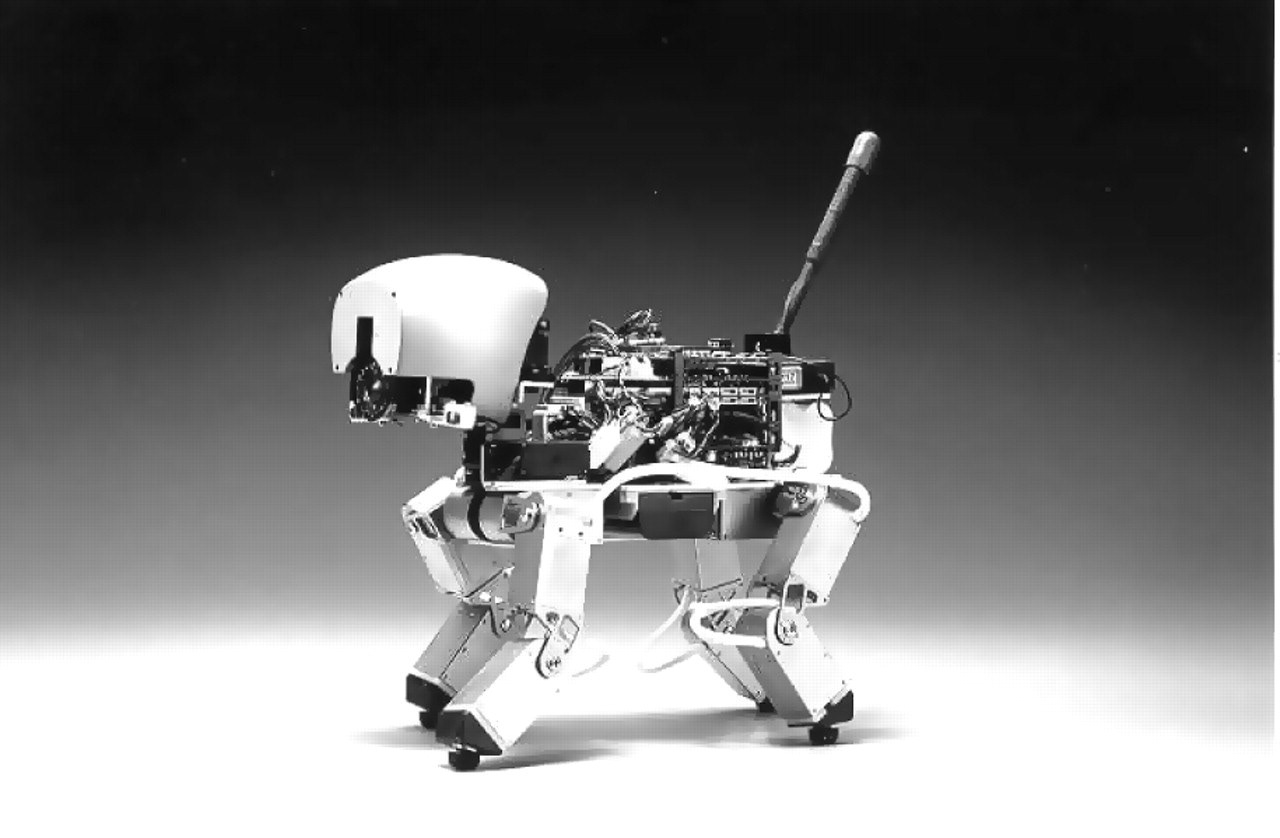
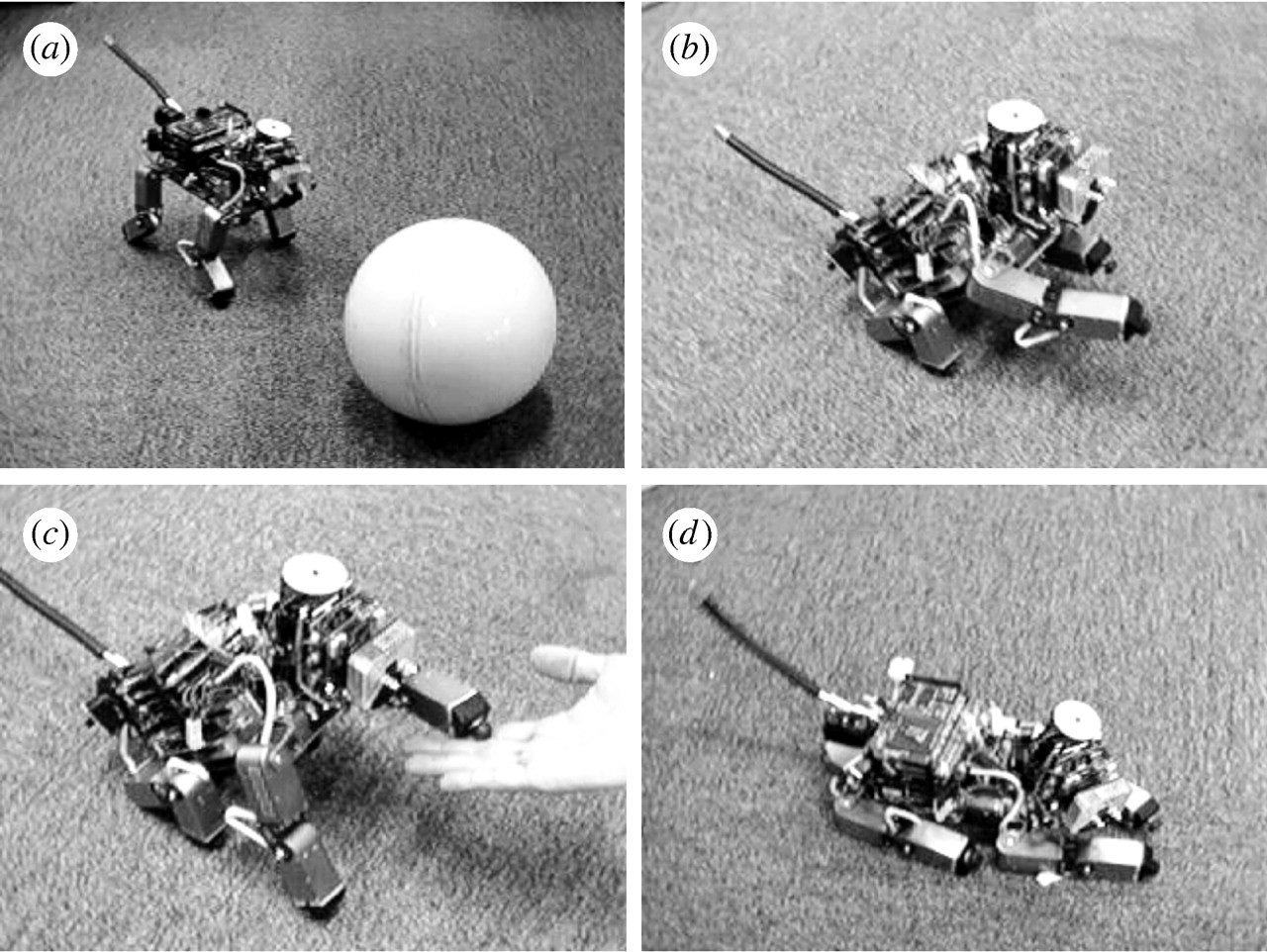
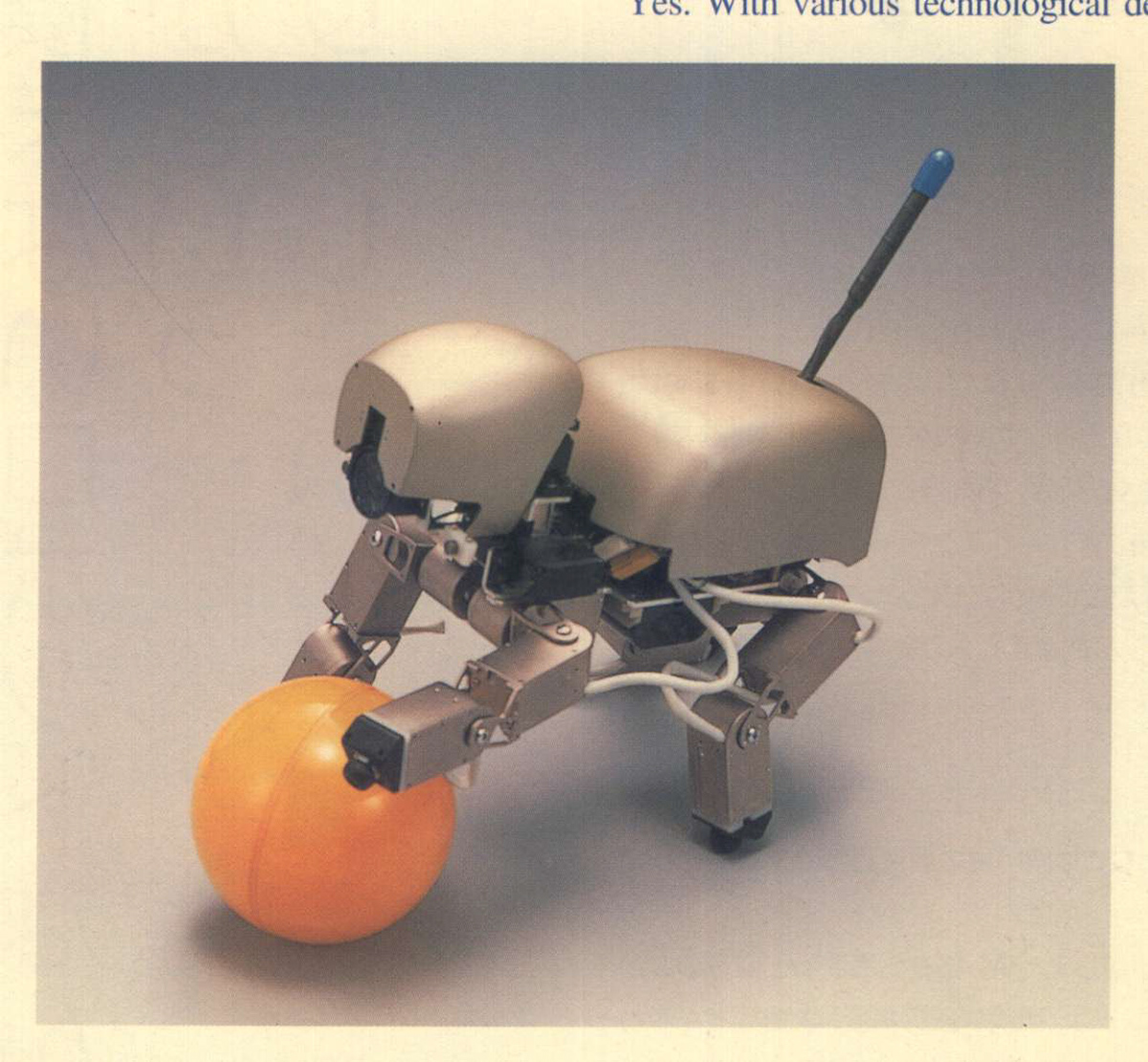
MUTANT (1994)
MUTANT was the first serious attempt at building a dog-like robot by the team at Sony - this version featured articulated legs, a head and tail and a sensor array more akin to Aibo. It could also chase after a orange ball thanks to its 'soccer' software. It is not known if this protoype uses removable media or not due to the research paper being paywalled. MUTANT was not modular but rather built solidly from metal pieces to ensure it could withstand testing and be easily servicable. The head and back covers lift off to allow easy access to all of the electronics.
The name comes from being a play on one of the development staff's daughters name 'Miu-tan':
"The daughter of one of the development staff was named Miu-chan, and it seems that she was called Myu-tan, so the name came from that."

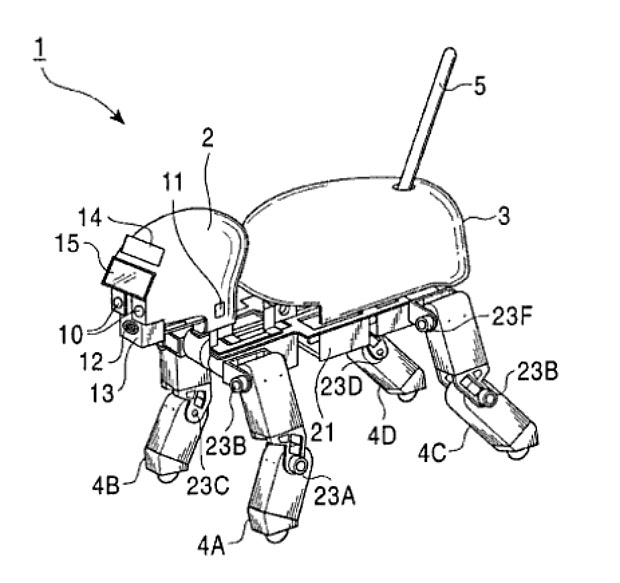
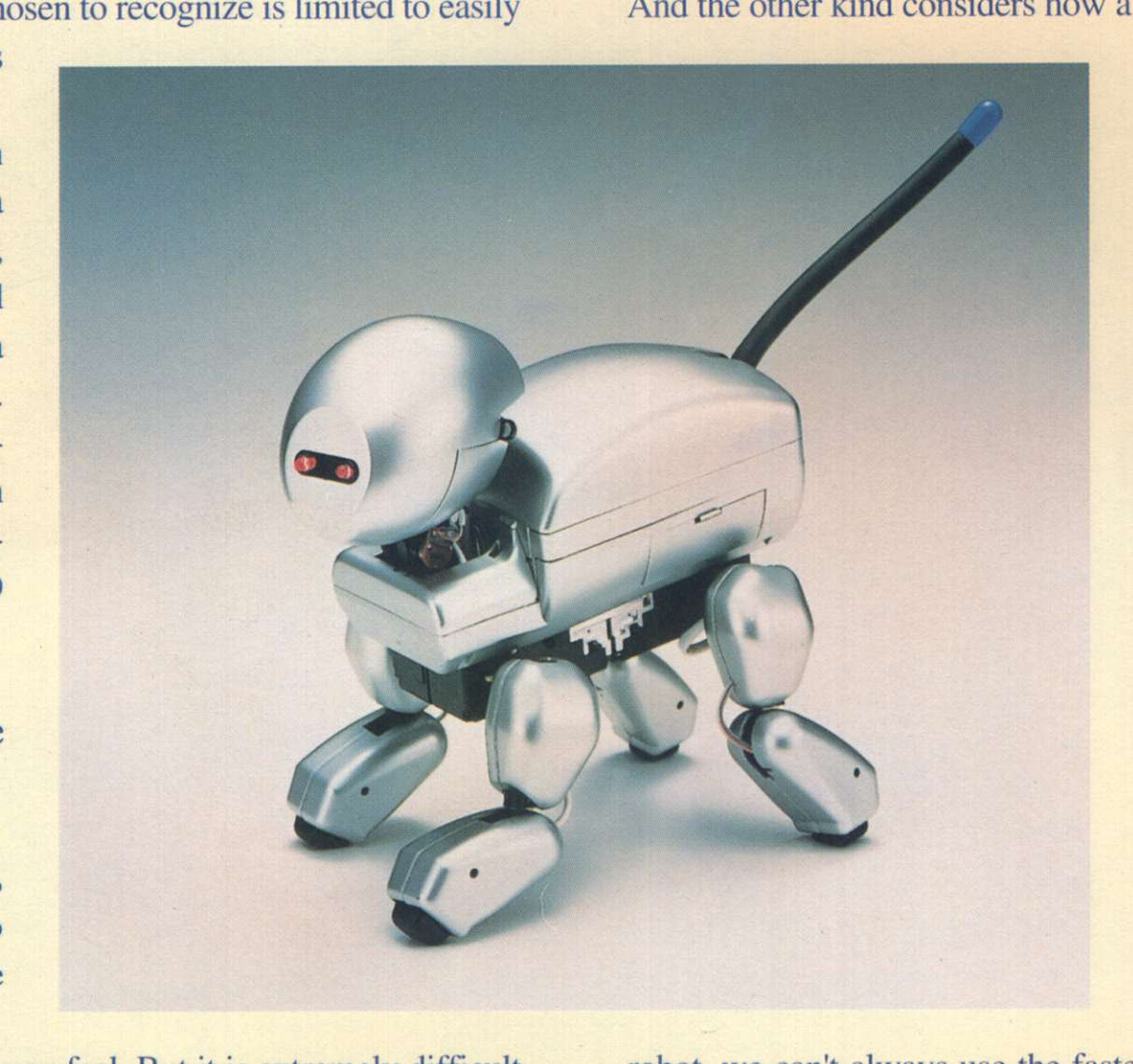
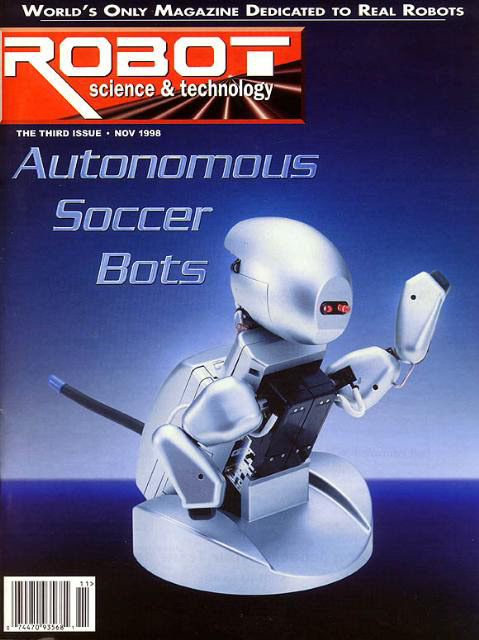
Prototype No. 6 (1998)
The first OPEN-R based prototype. The No. 6 prototype walks on four legs like AIBO, but by replacing the hind legs and tail with tires, we made it move as a wheeled mobile robot. This prototype was produced in the many for demostration Soccer tornaments so Masahiro could set up the RoboCup ahead of the 110's finalization. OPEN-R IC chips are contained in the head and legs, and the CPU of the core unit can recognize what kind of configuration the robot is by communicating with the OPEN-R IC of each unit. You can. Invisibly, it is the point that software can be accumulated. For example, motor and recognition middleware is passed on to software upgrades.
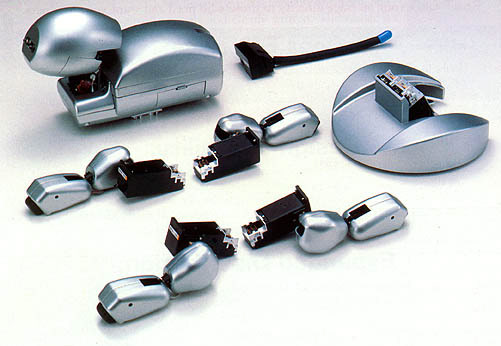
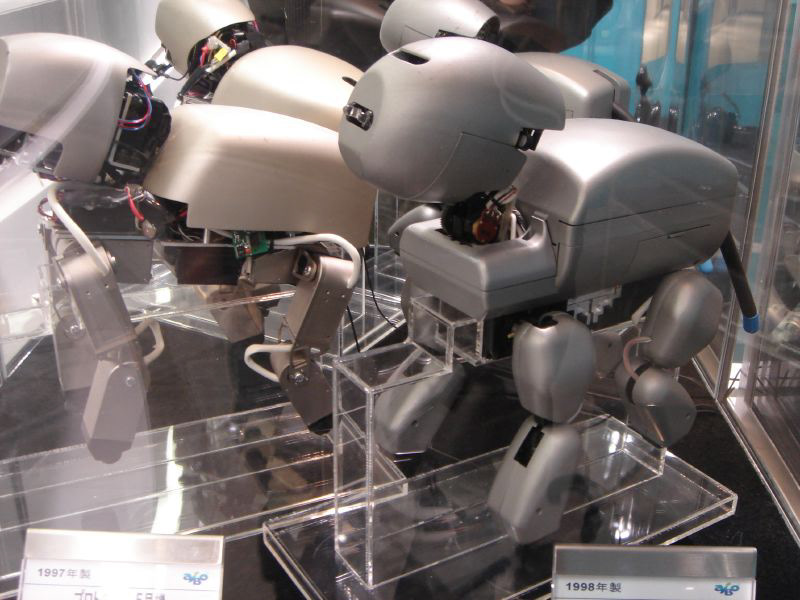
Modular Design:
Later AIBO Robot prototype with limb modules ejected. This modular structure was later kept for 1xx and 2xx series production models but later abandoned for 3xx and ERS-7 robots. The large object on the right is an optional wheeled module which the AIBO prototype could use instead of legs. The team developed this to demonstrate OPEN-R framework's ability to hot-swap parts and adapt to new configurations on the fly.

Front/underview

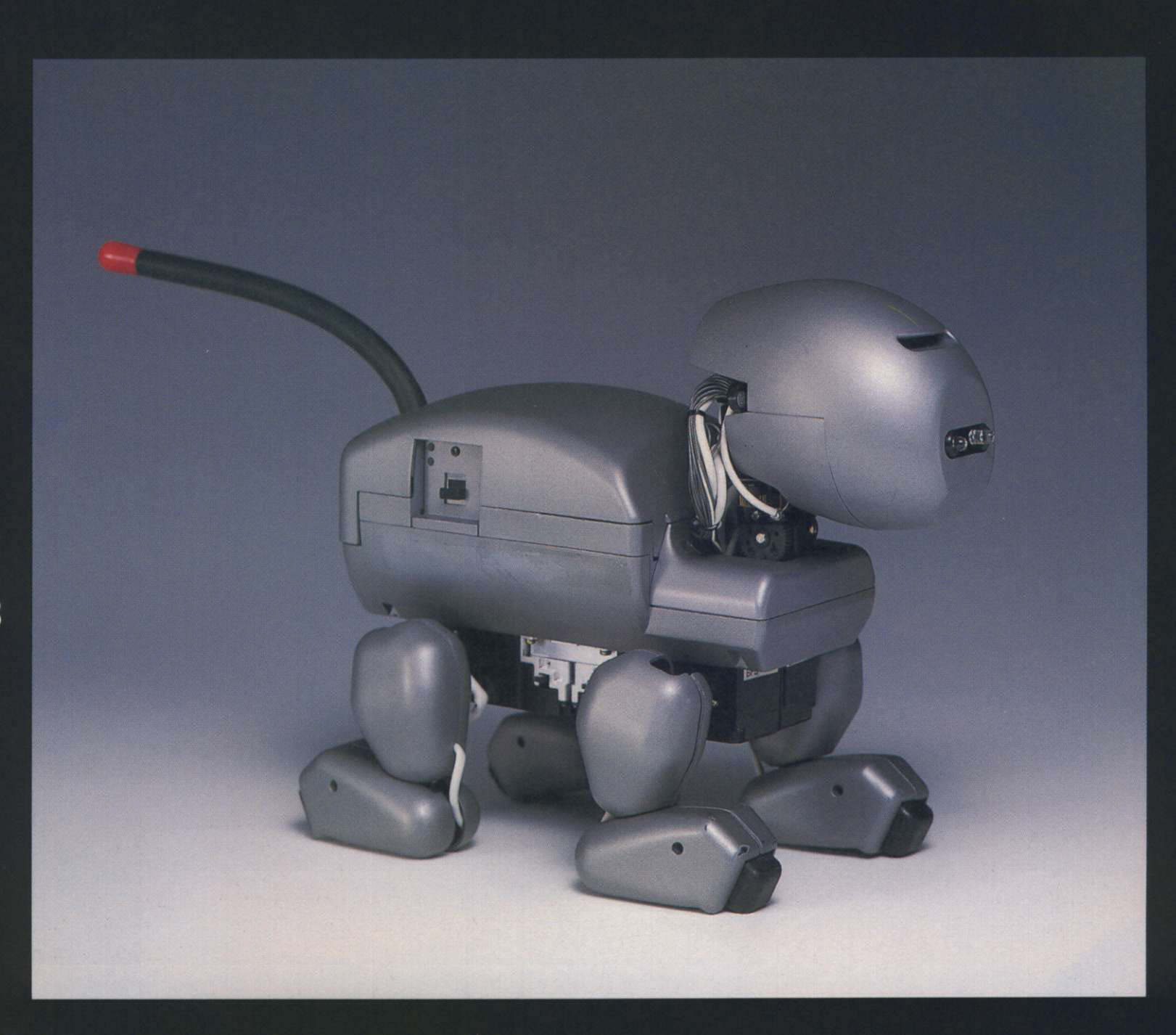
Side view

Back view
Chromoflair Prototype
Identical to the others of its model, this one features a cool colour-shift paint job. They are well known to the early-era Aibo fans as this was the prototype that Sony often bought to fan events around the world. In recent years it has been on display at Sony Store NYC and now at the Sony Ginza HQ along with other prototypes and the retail models.


1999-2006 Aibo Prototypes
After the discontinuation and shutdown of operations in 2006, many robot prototypes were silently given away to employees and people in the old community. In recent years these prototypes have popped up on auction websites by people not realising what they have enherited and in-turn, have been purchased and documented by people in the new community.
ERS-110/111 Prototypes
ERS-210 Prototypes

AIBO Ranch 210 - Prototype '138'
Prototype 210 owned by Bruce of the Aibo Ranch - this is the earliest documented 210 prototype in the community based off of its designation sticker in the core. The faceplate design is dramatically different with steeper curves on the eye lights. The core's MemoryStick slot has a different designed housing.
The location of this Aibo is currently unknown as it was stolen from the Ranch.


Buster - Prototype '168'
Owned by Aibo7m3, Buster is believed to be a prototype that was used for stress testing due to the excessive amount of wear on his body. There is a sticker in Buster's core that reads "168", and Buster's limbs are all numbered, with the numbers ranging from 159-168. Buster is described as "a lot more poorly built overall" when compared to a production model, with wires and flexi cables located in places where it would be easy for them to fray or break. At a glance, the construction of the chin sensor and tail hub appear to be similar to, or the same, as the Voice Recognition Demo prototype.
All of Buster's hip joints protrude from the leg sockets, though it is unclear at a glance whether this is due to construction or damage caused by stress testing. Green wire runs throughout Buster's legs and is visible on the knee joints.
Buster's face closely resembles that of a production model, however the covers for the eye lights are not frosted, so the circuit board in the head can be seen beneath the face. The core is different to the production core and modules are labled with identifiers.





ERS-3xx Prototypes
ERS-7 Prototypes
// Patient illustration and early prototype photographs //